Here, we demonstrate the basic steps for the Magnetic Vector Inversion in both Cartesian (MVI-C) and Spherical (MVI-S) coordinates.
We then demonstrate how a cooperative inversion approach (amplitude + MVI-C) can be used to improve the MVI-C solution.
Finally we show the advantages of using a sparse MVI-S code.
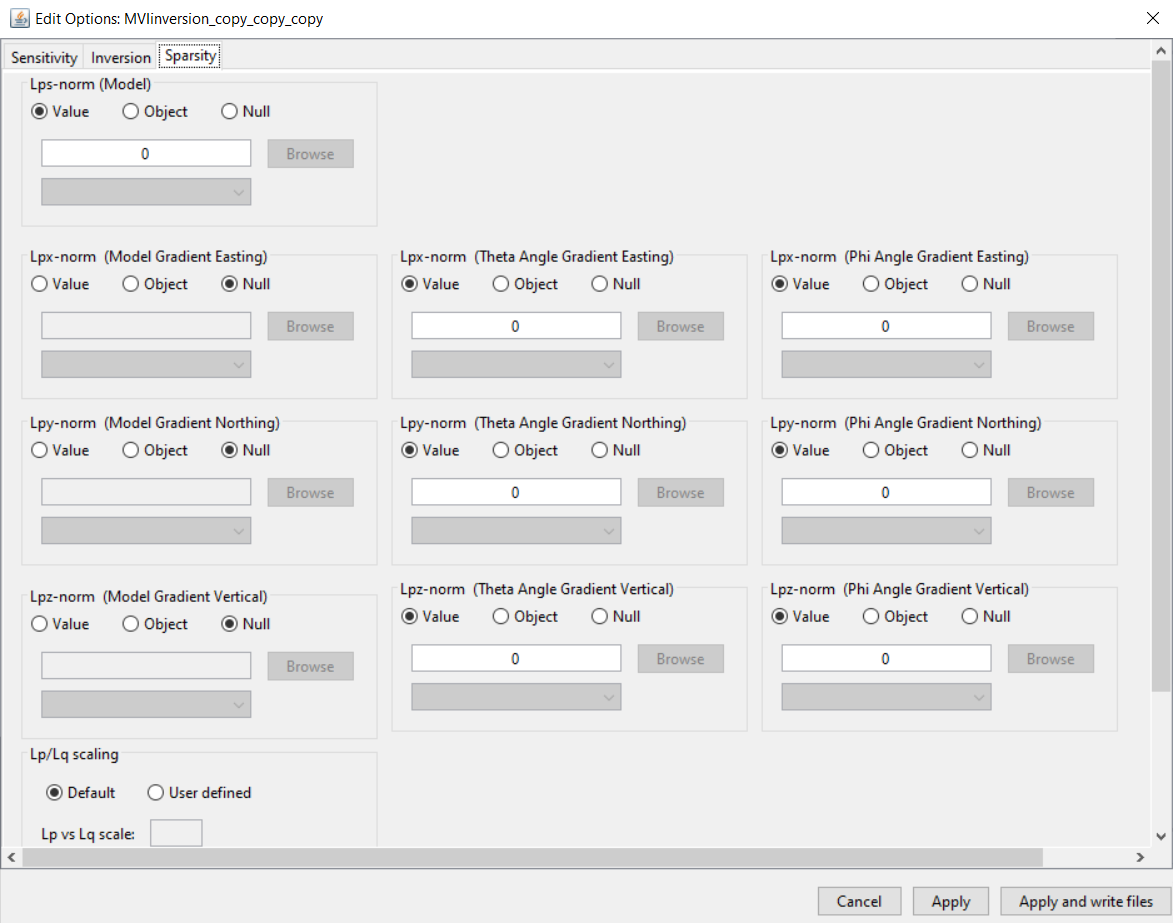
In this inversion, we will use the spherical transformation to apply sparsity
on the amplitude and angles independantly. The user is invited to try
different combination of norms to test the range of solutions.
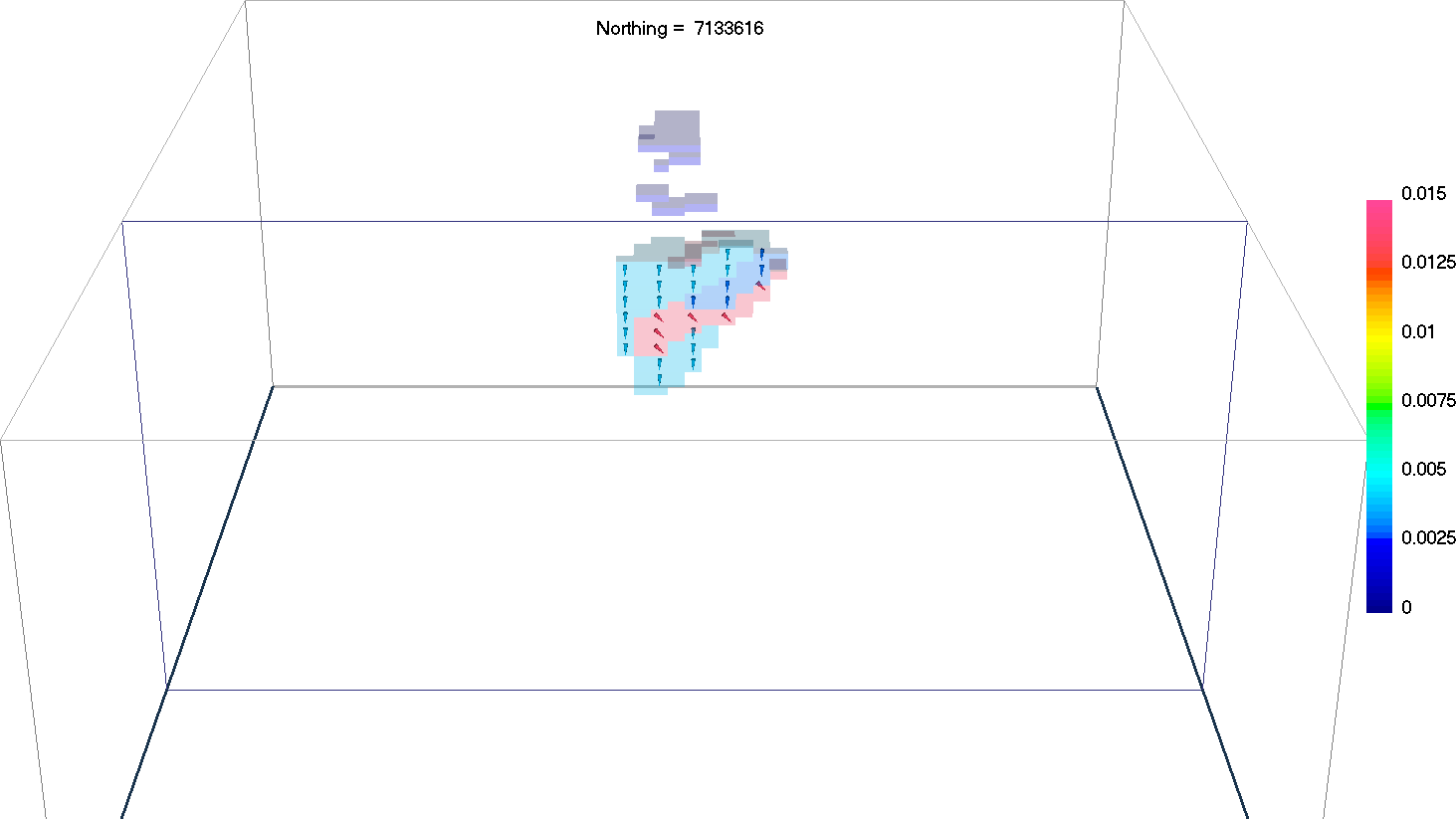
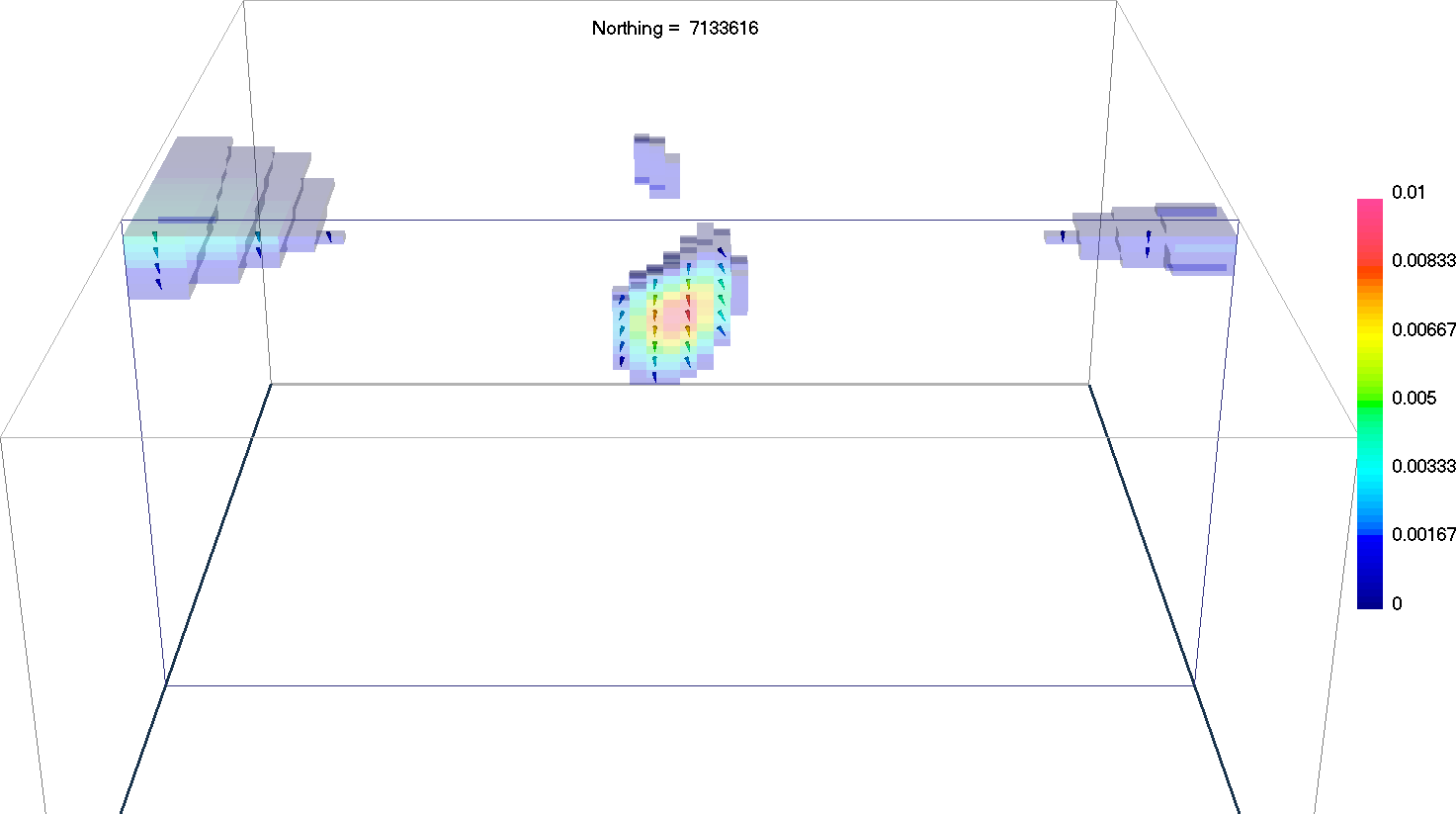
We have recovered three magnetic vector models with the following features:
The MVI-C model was successful in locating the the magnetic kimberlite
despite the presence of remanence. Due to the smoothness constraint, the
magnetization direction changes throughout the anomaly, making difficult to
distinguish a shape or overall trend.
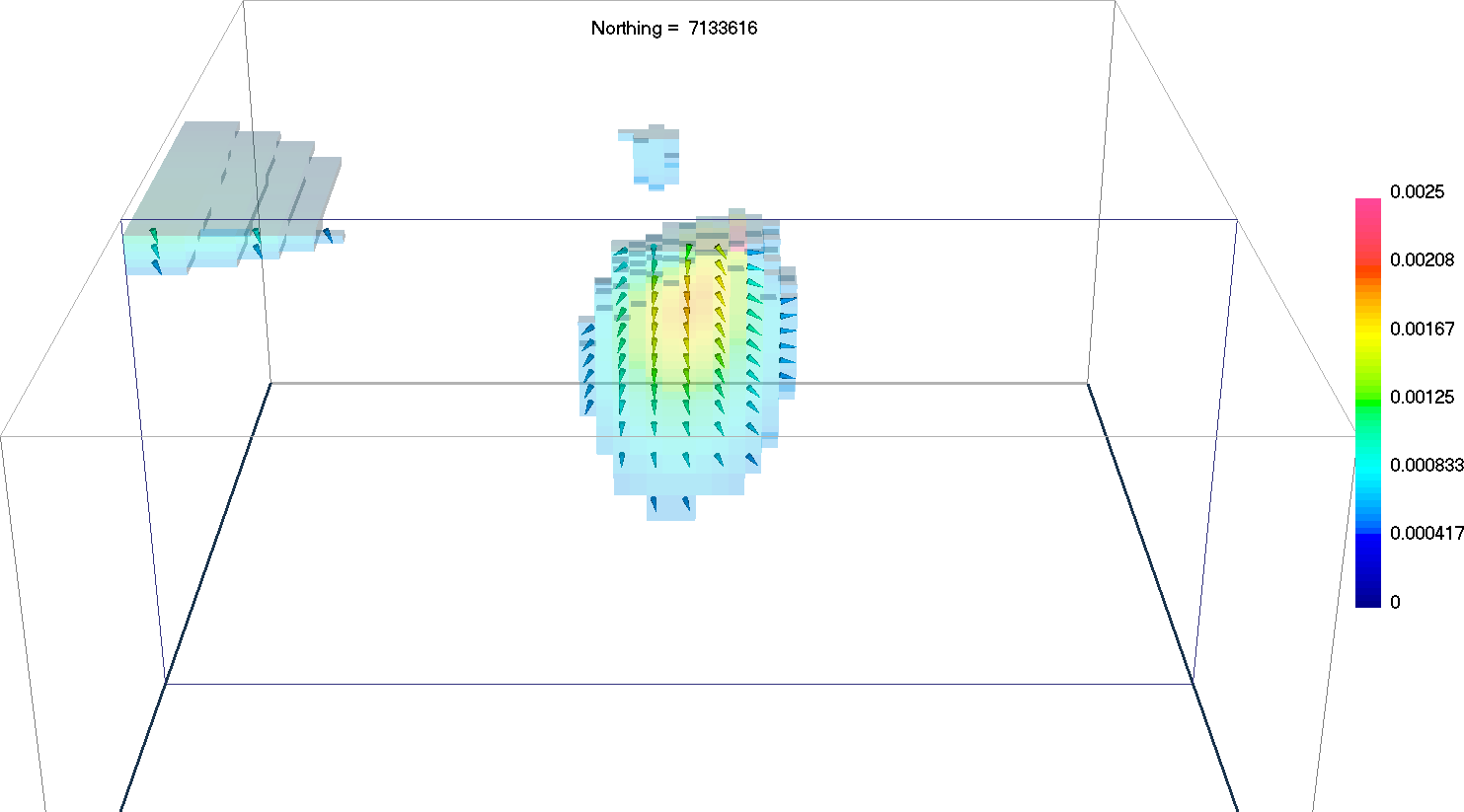
The Cooperative MVI-C and compact amplitude model dis a better job in
imaging a compact body. The magnetization orientation resemble much closely
the true model inside the pipe. The horizontal position of the maximum
anomaly appears to be slightly shifted West of the true model. This is due
assumptions made in the amplitude inversion.
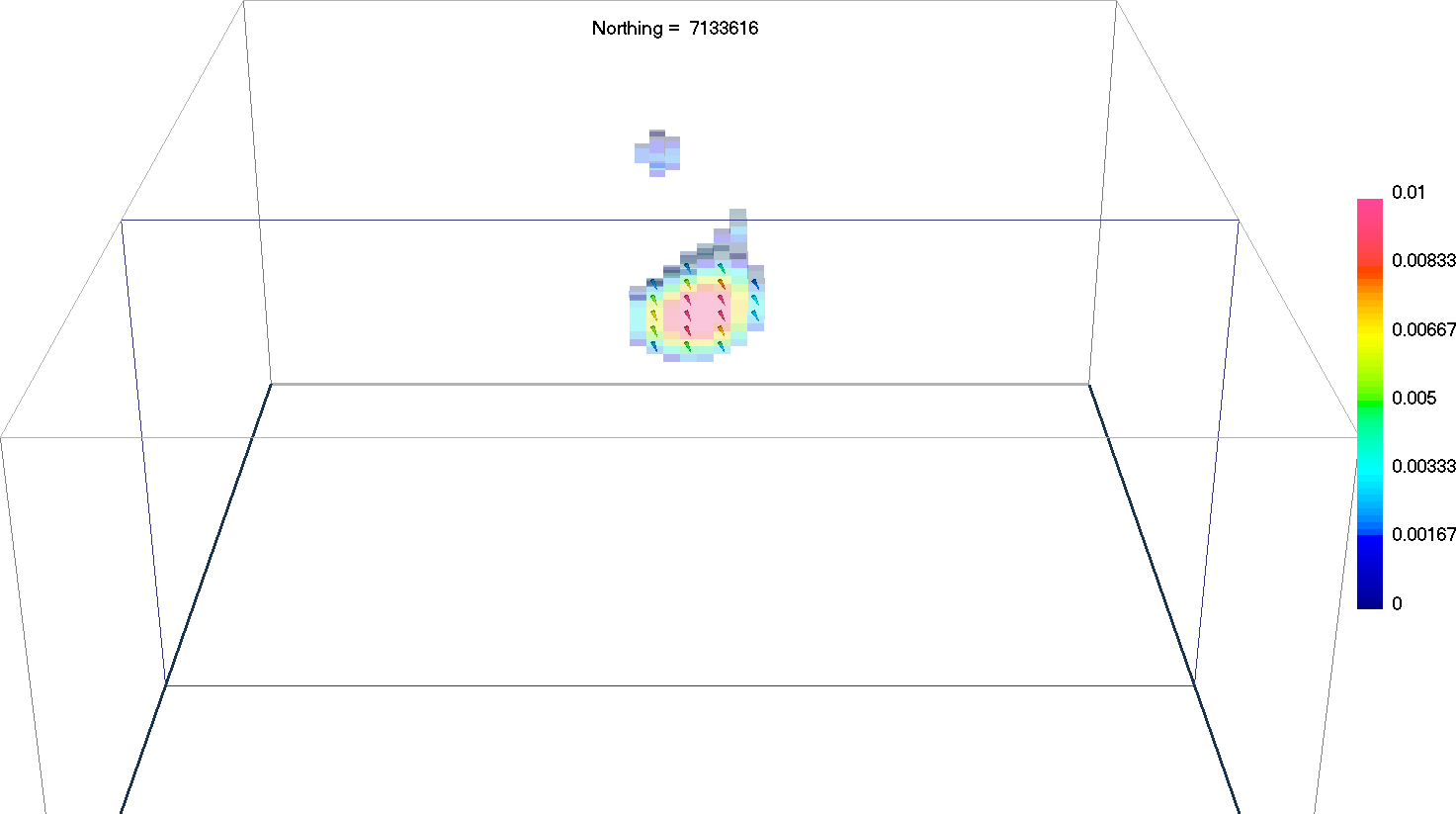
The sparse MVI-S inversion was arguably the most accurate in recovering both
the position and magnetization orientation. Sparsity on the amplitude forced
a compact anomaly, while blocky orientation angles allowed for rapid changes
in the magnetization direction.